3. Parts
- ESP32 DoIt DevKit V1
- Double H-Bridge L298N
- 2 brushed DC motors
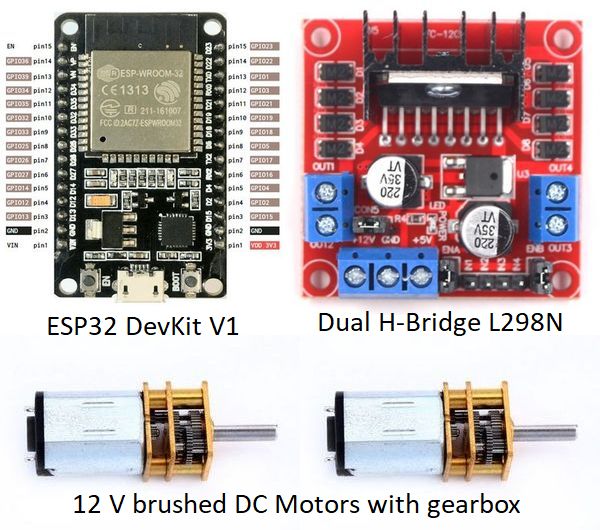
The project shows how a C++ motor class is designed that allows 2 DC motors to be controlled independently of each other at the same time. The double H-bridge module L298N, to which 2 motors can be connected, is used to drive the motors. Two control inputs make it possible to change the direction of rotation and another input controls the speed of rotation with the aid of a pulse-width-modulated (PWM) signal.
The ESP32 ledc subsystem provides functions for the configuration of the PWM.
The C ++ motor class should meet the following requirements:
We should be able to specify all required parameters in the class constructor. These are the the following:
.---.
| |
.-. |
( M ) | Motor_A
.----. `-´ |
| | | |
+ .-. | .-----o---o------------.
6 .. 12V ( V ) | | M1_A M2_A |
- `-´ | | |
| `---o 12V |
ESP32 GND ---+--------o GND |
out o 5V |
| L298N |
| Dual H-Bridge |
ESP32 18 -------------o EN_A |
22 -------------o IN1_A |
23 -------------o IN2_A |
2 -------------o IN1_B |
4 -------------o IN2_B |
15 -------------o EN_B |
| |
| M1_B M2_B |
`-----o---o------------`
| |
.-. |
( M ) | Motor_B
`-´ |
| |
`---`
To enable the PWM on the L298N module don't forget to remove the jumpers connecting the EN pins to logic HIGH.
My programming environment is not the native Arduino™ IDE but PlatformIO™ on top of Microsoft's Visual Studio Code™. This combination offers many advantages and allows a much better structuring of the code into several modules especially when we adopt The Object Oriented way.
The main program uses the class MotorBiDir which hides all the complexity of
the delay-less timing from the user so he can concentrate on implementing the tasks for the two motors.
These tasks are best implemented as state machines. Some examples are shown in the code.
Note: A future expansion will use the two cores of the ESP32 to implement the necessary multitasking.
Interested? Please download the entire program code. The zip-file contains the complete PlatformIO project.
My programming environment is not the native Arduino™ IDE but PlatformIO™ on top of Microsoft's Visual Studio Code™. This combination offers many advantages and allows a much better structuring of the code into several modules especially when we adopt The Object Oriented way.